Multiview Neural Surface Reconstruction by Disentangling Geometry and Appearance#
Authors: Lior Yariv, Yoni Kasten, Dror Moran, Meirav Galun, Matan Atzmon, Ronen Basri, Yaron Lipman
Affiliations: Weizmann Institute of Science
NeurIPS 2020
Links: arXiv, Project Page, Code
Summary#
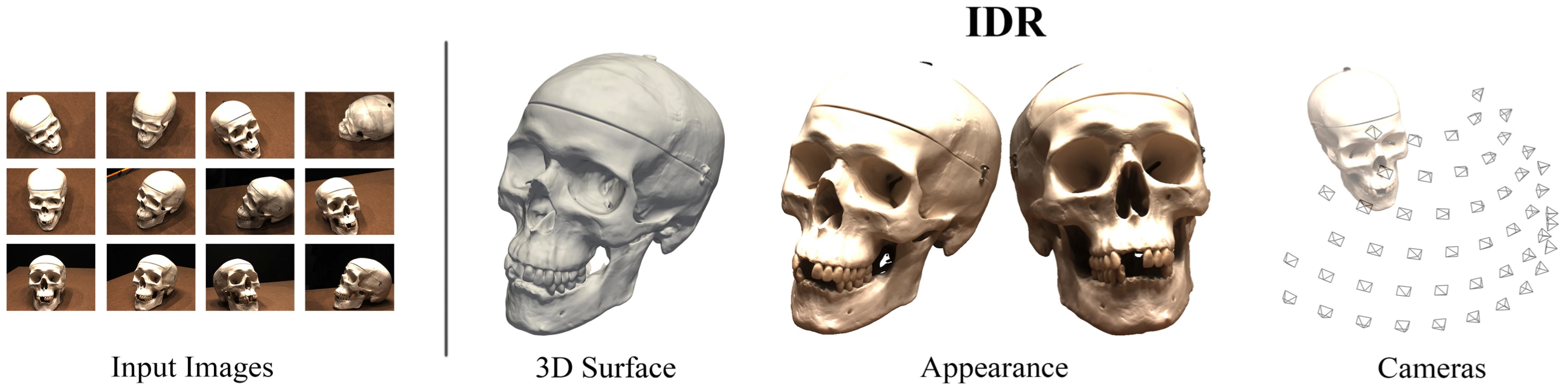
In this work the authors introduce a neural network architecture that simultaneously learns the unknown geometry, camera parameters, and a neural renderer that approximates the light reflected from the surface towards the camera. By training the network on real world 2D images of objects with different material properties, lighting conditions, and noisy camera initializations from the DTU MVS dataset, the model can produce state-of-the-art 3D surface reconstructions with high fidelity, resolution, and detail.
Key Ideas#
The goal is to reconstruct the geometry of an object from masked 2D images with possibly rough or noisy camera information. There are three unknowns:
geometry
appearance
cameras
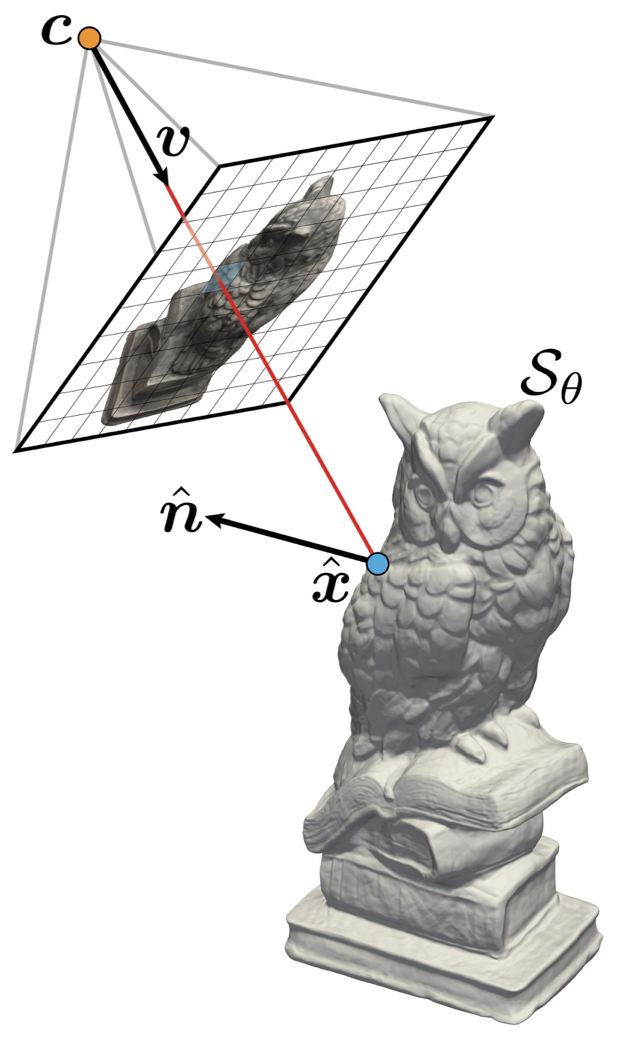
The geometry is represented as the zero level set of an MLP
IDR forward model. Let the pixel be
Approximation of the surface light field. The surface light field radiance
The BRDF function
The light sources are described by a function
The overall rendering equation is given by
where
Masked rendering. Consider the indicator function identifying whether a certain pixel is occupied by the rendered object
which approximates
Loss. The loss is given by
where
Technical Details#
Notes#
References#
[1] A. Gropp, L. Yariv, N. Haim, M. Atzmon, Y. Lipman. Implicit geometric regularization for learning shape. In arXiv, 2020.